








Autor tekstu: Krystian Pyszczek
Zapewne niewiele jest osób, które nie kojarzyłyby kultowej serii filmów „Gwiezdne Wojny” autorstwa wybitnego reżysera George’a Lucasa. Pierwsza część tej sagi zadebiutowała w 1977 roku i opowiadała o galaktycznym konflikcie toczącym się pomiędzy złym Imperium a broniącymi wolności rebeliantami. Jak na film science-fiction przystało, w produkcjach tych mogliśmy zobaczyć wiele fikcyjnych pojazdów bojowych, wśród których najbardziej w pamięć zdecydowanie zapadły AT-AT, czyli ogromne transportery opancerzone wyposażone w długie mechaniczne nogi. Dlaczego natomiast wspominam o Gwiezdnych Wojnach na 40tonach? Otóż okazuje się, że pojazdy tego typu nie są do końca wytworem wyobraźni Lucasa. Przez wiele lat armia amerykańska rzeczywiście prowadziła badania nad zastąpieniem terenowych ciężarówek maszynami wyposażonymi w mechaniczne nogi.
AT-AT w „Gwiezdnych Wojnach: Imperium Kontratakuje”:
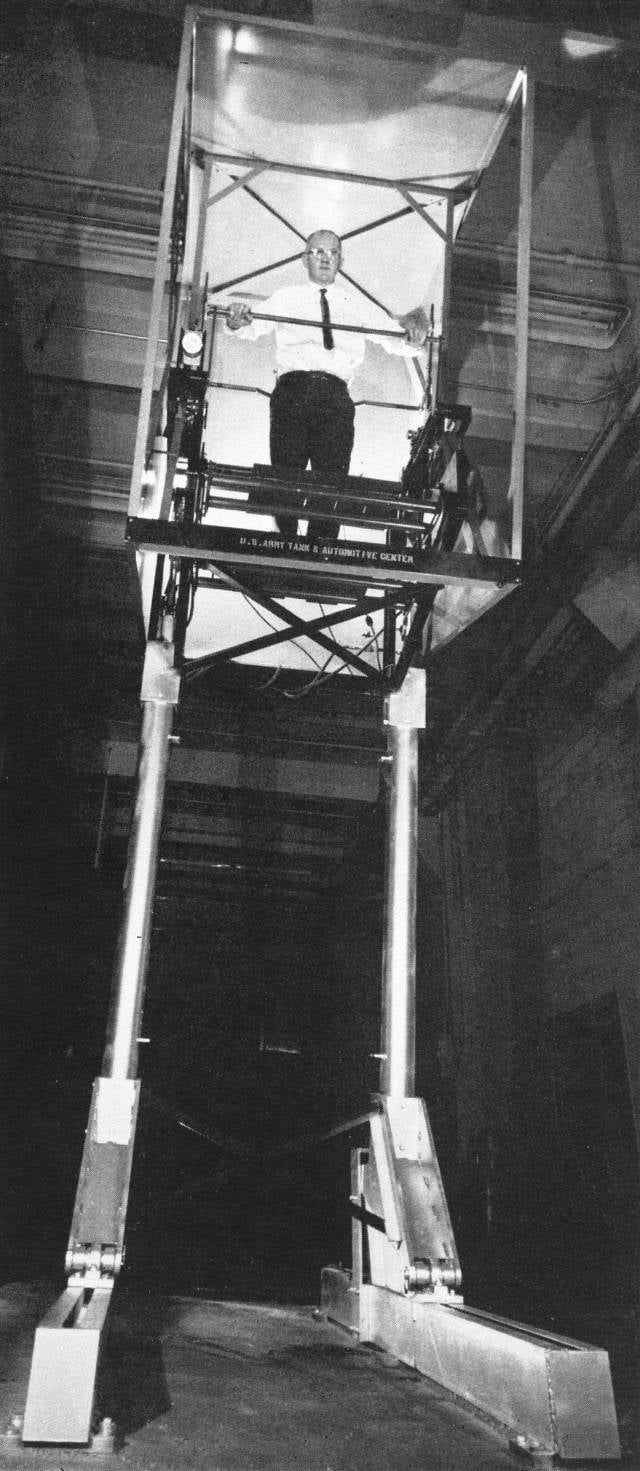
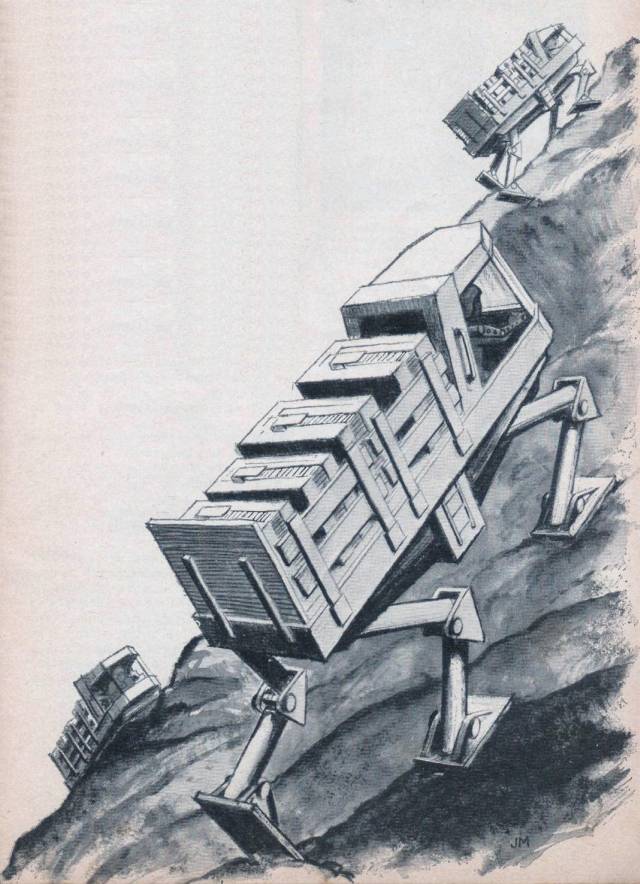
Sama idea wojskowego pojazdu kroczącego pojawiła się już w 1964 roku, kiedy to na wystawie w Nowym Jorku zaprezentowano szkic przedstawiający fikcyjny pojazd Army Landwalker przeznaczony do celów typowo transportowych i mający zastąpić zwykłe ciężarówki. Oczywiście sam rysunek mocno wybiegał w przyszłość i był raczej luźnym wytworem czyjejś wyobraźni, jednak dokładnie w tym samym roku inżynier Ralph Mosher z firmy General Electric rzeczywiście zaproponował armii amerykańskiej stworzenie dwunożnego „walkera” (od angielskiego słowa „walk” oznaczającego „chodzić”). Pojazd ten, nazwany GE Pedipulator, doczekał się nawet działającego prototypu, jednak ostatecznie nigdy nie trafił na uzbrojenie wojska.
Szkic koncepcyjny z 1964 roku:

Prototypowy, dwunogi GE Pedipulator:
Do koncepcji kroczących pojazdów szybko jednak powrócono. Wkrótce bowiem Stany Zjednoczone zaangażowały się w wojnę w Wietnamie, a jedną z największych przeszkód na jakie natrafiły wówczas wojska amerykańskie była nieprzebyta azjatycka dżungla, która stanowiła poważne wyzwanie zarówno dla tradycyjnych kołowych ciężarówek, jak i gąsienicowych transporterów i czołgów. To najprawdopodobniej z tego powodu urzędnicy w Pentagonie poważnie zaczęli rozważać stworzenie pojazdów transportowych wyposażonych w mechaniczne nogi, gdyż taki układ miał znacząco lepiej sprawdzać się na gęsto zalesionych terenach. Ponownie więc nawiązano współpracę z Mosherem i w ten oto sposób rozpoczęto program „Walking Truck”, czyli „Chodzącej ciężarówki”.
Tak armia wyobrażała sobie kroczący transport:
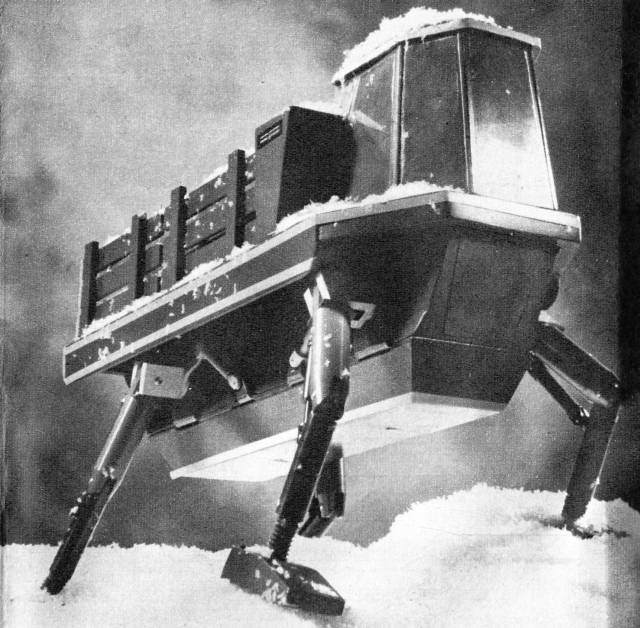
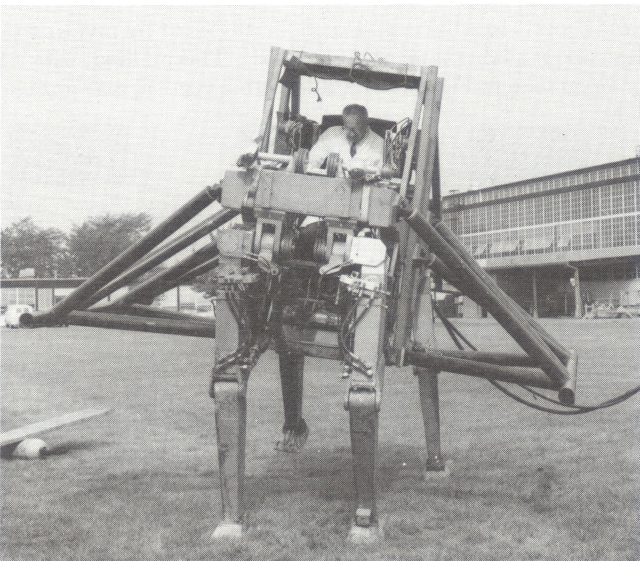
Dzięki rządowemu wsparciu już w 1965 roku zbudowano kolejny prototyp, znany pod skrótem CAM (ang. Cybernetic Anthropomorphous Machine, Cybernetyczna Maszyna Antropomorficzna). Rzeczony pojazd mierzył ok 3,4 metra wysokości, ważył 1,3 tony, a jego „układ jezdny” stanowiły cztery mechaniczne nogi. Całość wyposażono w 90-konny silnik benzynowy połączonym z silnikiem elektrycznym, który napędzał skomplikowany układ hydrauliczny umożliwiający poruszanie kończynami. I choć sama koncepcja wydawała się być bardzo obiecująca, natrafiano na szereg problemów natury technicznej.
Prototyp CAM:
Przede wszystkim układ sterujący nogami wymagał użycia aż 250 litrów oleju hydraulicznego, co oczywiście wiązałoby się z zastosowaniem ogromnego zbiornika. Dlatego na testach krocząca ciężarówka była dosłownie uwiązana przewodami do zewnętrznego źródła oleju. Także sterowanie CAM-em było bardzo skomplikowane, bowiem operator musiał obsługiwać każde odnóże osobno: za pomocą rąk kontrolowano nogi przednie, a za pomocą stóp nogi tylne. Dodatkowo całość odznaczała się niską stabilnością, co często prowadziło do przewracania się pojazdu. Rozczarowujące okazały się być ponadto właściwości terenowe, niska prędkość maksymalna wynosząca zaledwie 8 km/h, a także ładowność na poziomie 270 kg, znacznie niższa niż w najmniejszych nawet ciężarówkach. W efekcie po serii testów projekt kroczącej maszyny został zakończony, a CAM trafił do Muzeum Transportu Armii Amerykańskiej w Wirginii, gdzie można podziwiać go po dziś dzień.
CAM z testowymi podporami:
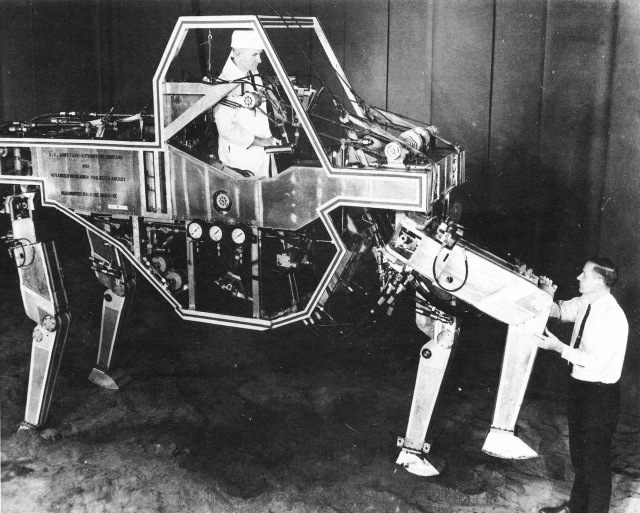
Porażka projektu Moshera nie zniechęciła jednak Amerykanów do prowadzenia dalszych badań nad tego typu pojazdami. Na przestrzeni lat technologia znacząco się rozwinęła, co sprawiło, iż w styczniu 1981 roku na zlecenie Agencji Zaawansowanych Projektów Badawczych w dziedzinie Obronności ponownie podjęto próbę stworzenia „ciężarówki na nogach”. Tym razem badania odbywały się na Państwowym Uniwersytecie w Ohio, a pracami kierowali inżynierowie Robert McGhee i Kenneth Waldron. Cały program otrzymał nazwę Adaptive Suspension Vehicle (w skrócie ASV), co oznaczało Pojazd o Adaptacyjnym Zawieszeniu. Konstruowanie go zajęło aż 9 lat, jednak efekt końcowy bez wątpienia robił wrażenie.
Prototyp ASV:

Przede wszystkim nowa maszyna krocząca była znacznie większa, gdyż miała sześć nóg, mierzyła 5,2 metra długości, 2,4 metra szerokości, 3 metry wysokości, a jej masa własna dochodziła do 2,7 tony. Nadwozie z kolei wykonane zostało z aluminium. Co więcej, o ile pierwszy Walking Truck w dużej mierze opierał się na czystej, stosunkowo prymitywnej mechanice, tak w ASV na szeroką skalę zastosowano nowoczesne rozwiązania z dziedziny informatyki.
ASV w czasie przechodzenia przez rów:

Podstawą systemu był przedni radar, który automatycznie badał znajdujący się przed pojazdem teren. Rzeczony radar przekazywał następnie informacje do łącznie szesnastu ośmiobitowych komputerów Intel, z czego sześć zostało umieszczonych bezpośrednio przy mechanicznych odnóżach. Samo programowanie tak rozbudowanego systemu było bardzo trudne i ostatecznie zawierało aż 150 tys. linii kodu źródłowego. Brzmi to skomplikowanie, ale dzięki temu kierowca kontrolował pojazd tylko i wyłącznie za pomocą pojedynczego joysticka. Nie trzeba było więc sterować każdą nogą osobno jak w przypadku poprzednika, gdyż całe „zawieszenie” automatycznie dostosowywało się do pokonywanej nawierzchni.
ASV w kolorze:
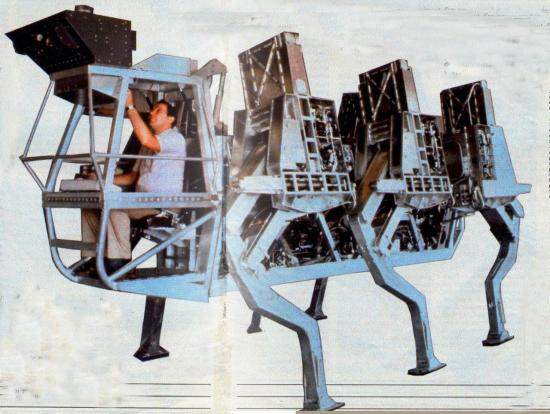
W przypadku ASV niezwykle ciekawie rozwiązano także kwestię napędu. Sercem kroczącej maszyny był silnik motocyklowy o pojemności 0,9 litra i mocy 91 KM, który połączono z kołem zamachowym zdolnym do osiągnięcia 12 000 obr/min. Rzeczone koło zamachowe służyło z kolei do wytwarzania do 250 Wattów energii elektrycznej. Po co to wszystko? Aby odpowiedzieć na to pytanie warto omówić bądź co bądź skomplikowaną zasadę działania ASV. Podczas normalnego ruchu silnik spalinowy dostarczał moc z wału wyjściowego do trzech oddzielnych wałów napędowych za pośrednictwem pasków zębatych. Biegły one przez całą długość pojazdu i przekazywały moc do łącznie osiemnastu pomp hydraulicznych zamontowanych przy nogach (po trzy na każde odnóże). Czasem jednak zdarzały się sytuacje (takie jak pokonywanie szczególnie trudnych do przebycia przeszkód) w których moc motocyklowego silnika nie wystarczała: wtedy to właśnie wykorzystywano moc elektryczną. Co więcej w momencie zatrzymania ASV część energii ponownie wracała do koła zamachowego i była tam magazynowana: rozwiązanie to przypominało nieco współczesne auta hybrydowe, gdzie część energii jest odsyłana z powrotem do akumulatorów podczas hamowania.
ASV na filmie:
ASV pod wieloma względami był pojazdem udanym. Szczególnie dobre były przede wszystkim zdolności terenowe, pozwalające pokonywać przeszkody pionowe o wysokości 2,1 metra, a także przekraczać rowy o szerokości 2,8 metra (dane te jednak często różnią się w zależności od źródła). Nie straszne były mu także wszelkiego rodzaju tereny oblodzone, górskie czy piaszczyste, głównie z powodu tego, iż ASV posiadał aż sześć trybów ruchu. W niektórych z nich ciężarówka dodatkowo była częściowo autonomiczna – można zaprogramować ją tak, aby poruszała się automatycznie w kolumnie kilku innych pojazdów tej klasy. Niestety oprócz zalet pojawiały się także wady. Znowu narzekano na niską ładowność, wynoszącą zaledwie 220 kg, a także na małą prędkość maksymalną, na poziomie niecałych 13 km/h. Dodajmy do tego wszystkiego duże koszty produkcji i wysokie skomplikowanie konstrukcji, a mamy odpowiedź dlaczego w 1990 roku ostatecznie zrezygnowano z tego pomysłu.
Prototyp ASV w 1986 roku: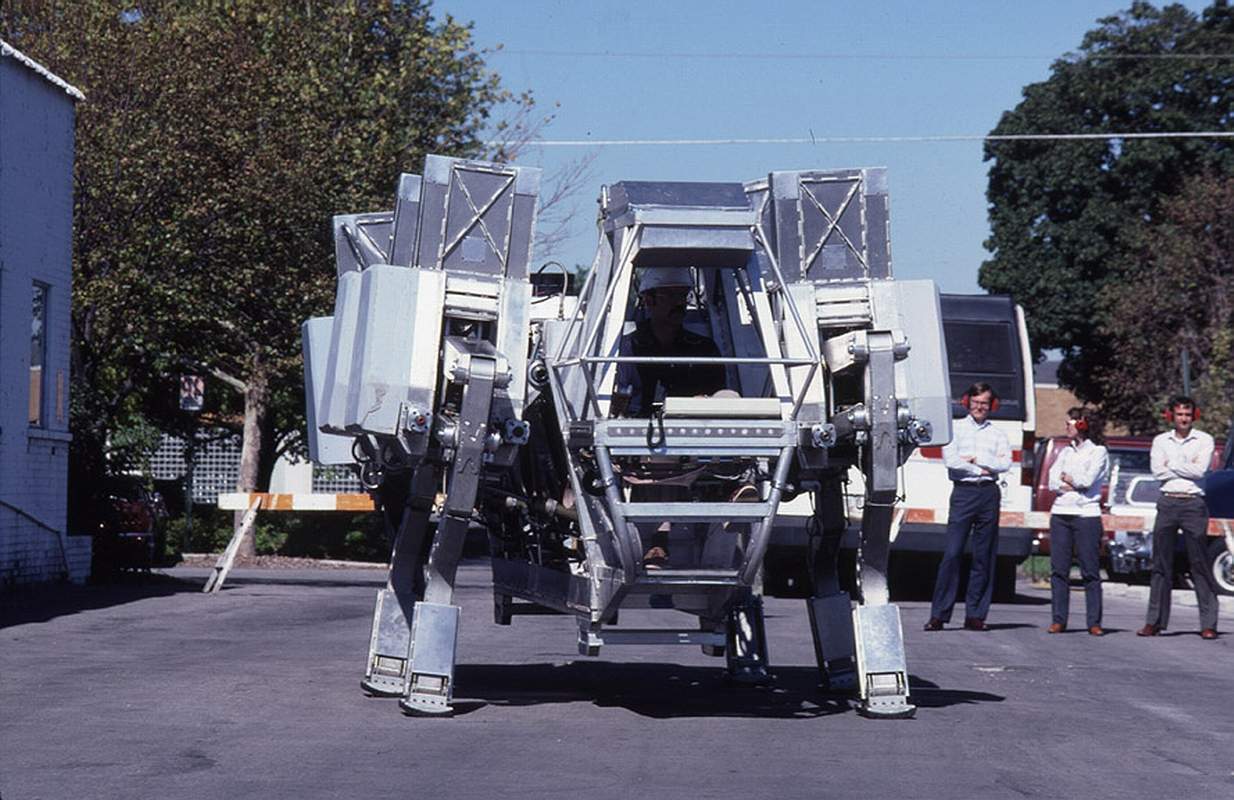
Wraz z zakończeniem programu ASV armia amerykańska definitywnie zarzuciła ideę budowy transportowej maszyny kroczącej. Nie oznacza to jednak, iż pojazdy wyposażone w mechaniczne nogi całkowicie zniknęły z użytku. Jeśli chodzi o pomysły typowo wojskowe, w USA testowano m.in. niewielkiego robo-psa przeznaczonego do transportu broni i zaopatrzenia. W przypadku większych maszyn warto wspomnieć o fińskiej firmie Plustech (należącej do amerykańskiego przedsiębiorstwa John Deere), która swego czasu opracowała kroczący ciągnik Walking Tractor Timberjack, przeznaczony do wycinki drewna. W 2019 roku natomiast koreański Hyundai zaproponował wizję niewielkiego auta miejskiego, które posiadałoby zarówno tradycyjne koła jak i mechaniczne nogi.
Walking Tractor Timberjack:

Hyundai:

Robo-pies:


